圳市原像(xiàng)天成科技有限公司(sī)")

手 機:18002562417
郵 箱:mls@mileview.cn
電 話:18002562417
網 址:www.miletv.com
地 址:深圳市寶安區西(xī)鄉街道固興社區航(háng)城大道敦發工業園(yuán)A棟212
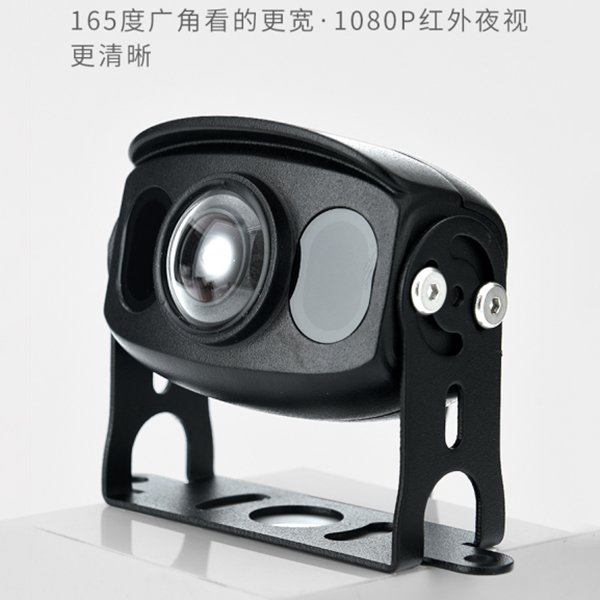
盲區(qū)檢測攝像頭通常會(huì)使用以下幾種傳(chuán)感器技術:
一、圖(tú)像傳感(gǎn)器技術
CMOS圖像傳感器:這是目前在盲區檢測攝像頭中(zhōng)廣泛應用的一種圖像傳感(gǎn)器。它具有功耗低、集(jí)成(chéng)度高、成本相對較低(dī)等優點。CMOS圖像傳感器能夠將光線轉化為電信號,生成清晰(xī)的圖像。通過對圖像的分析處理,可以(yǐ)檢測到車輛盲區中的物(wù)體。例如,在車輛轉彎時,攝像頭可以捕捉到車輛側後方的圖像,幫助(zhù)駕駛員及時發現潛在的危險。
高動(dòng)態範圍(HDR)技術:為了應對(duì)不同光照條件下的拍攝需求,盲區檢測攝像頭通常會采用高動態範圍技術(shù)。這種技術可以在強光和弱光同時存(cún)在的環境中,捕捉到更多的細節,提高(gāo)圖像的質量。例如,當車輛從暗處駛出到陽(yáng)光下時,HDR技術可以確保(bǎo)攝像頭依然能夠清晰地拍(pāi)攝(shè)到盲區中的物體。
區(qū)檢測攝像頭")
二、距離檢測傳(chuán)感器技術
超(chāo)聲波傳感器:在一些(xiē)盲區檢測係統中,會結合超聲波傳感器來輔助檢測物體的距離(lí)。超聲波傳感器通過發射超聲波並接收反射回來的信號,根據信號的往返時間來計算物體與車輛的距離。雖然超(chāo)聲(shēng)波傳感器的精度相對較低,但它可以在近距離(lí)範圍內提(tí)供快速(sù)的距離檢測,與攝(shè)像頭配合使用可以提高盲區檢測的準確性。
毫米波雷達(dá)傳感器:毫米波(bō)雷達傳感器具有高精度、遠距離檢測的能力。它可以通過發射毫米波信號(hào)並接收反射信(xìn)號,來確定(dìng)物體(tǐ)的位置和速度。在盲區檢測中,毫米(mǐ)波雷達可以(yǐ)在較遠的距離上檢測到(dào)車輛側後方的物體,並提供準確的距離(lí)和(hé)速度信(xìn)息。與攝像頭相結合,可以實現更(gèng)可靠的盲區監測和預(yù)警。
三、圖像處理與(yǔ)分析技術
目標檢測算法:盲區(qū)檢測(cè)攝(shè)像頭需要對拍攝到的圖像進行(háng)實時分析,以檢測出其中的物體。目標檢測算法可以通過(guò)對圖像中(zhōng)的特征進(jìn)行提取和分析,識別出車輛(liàng)、行人、障礙物等目標。例如,基於深度學(xué)習的目標檢測算法可以(yǐ)在複雜的環境中準確地檢測出(chū)各種物體,為駕(jià)駛員提(tí)供(gòng)及(jí)時的預警(jǐng)信息。
圖(tú)像增強技術:為了提高圖像的質量和可讀性,盲區檢測攝(shè)像頭通常會采用圖像增強技術。這些技術可以包括對比度增強、去(qù)噪、邊緣增強等。通過對圖像進行處理,可以使物體更加清晰可見,提高盲區檢測的效果。總之,盲區檢測攝像頭綜合運用了多種傳(chuán)感器技術和(hé)圖像處理技術,以實現(xiàn)對車輛盲區的(de)有效監測(cè)和預(yù)警,提高行車安全性。
鄭經理
18002562417
深圳市寶安區西鄉街道固興社區(qū)航城大道(dào)敦發工業園A棟212
原像天成科技有限公司")

圖(tú)片1")


